randeu tobias
Donnerstag, 10. Juli 2008
|
|
aus unerklärlichen gründen ist der roboter heute vom tisch gefallen. deshalb brauchten wir viel zeit um ihn zu reparieren. den rest des vormittags verbrachten wir mit programmieren. am nachmittag probten wir die morgige aufführung auf der bühne. am ende fährt er noch auf einer linie entlang. morgen steht ein batteriewechsel auf dem programm. 
|
hinterlechner daniel
Donnerstag, 10. Juli 2008
|
|
Gestern haben wir unseren Klimabot fertig zusammen gebaut und schon teilweise programmiert. Er kann jetzt an zwei Stationen die Temperatur und den Lichtwert messen. 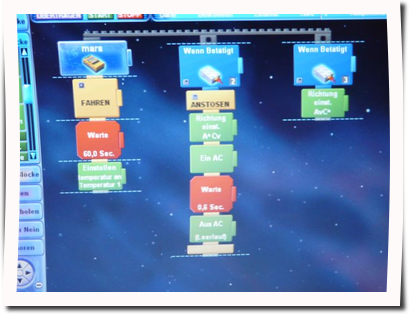
|
Ansaloni Julian
Dienstag, 8. Juli 2008
Zuletzt geändert:
Mittwoch, 9. Juli 2008
|
|
Heute fingen wir mit unsererem eigentlichen Projekt der Marsmission an. Unsere Gruppe baute einen Transporter namens Transbot. Er besteht aus einem Roverbot und aus der von uns verlängerten Ladefläche. 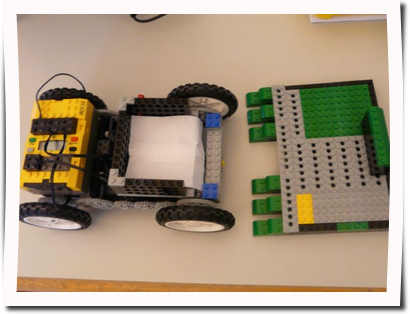
Anfänglich bereitete die Ladefläche uns Probleme, aber Freunde halfen bei der Behebung. Später halfen wir bei verschiedenen Sachen mit. Lukas, Tobias, Julian
|
oberrauch moritz
Dienstag, 8. Juli 2008
|
|
Auch heute wieder haben wir an unseren Robotern für die Marsmission gebastelt! Trotz mehreren  Herausforderungen sind wir mit unserem Projekt, der Sortiermaschine, einen großen Schritt weiter gekommen. Förderband und Sensoren sind so gut wie fertig gestellt, es fehlt nur noch an dem Sortiermechanismus und der Programmierung!!  
|
randeu tobias
Dienstag, 8. Juli 2008
|
|
Jede Gruppe bekam einen Auftrag (Roboter entwerfen, bauen und programmieren). Jeder Roboter musste bestimmte Fähigkeiten haben. Unserer misst die Temperatur und die Helligkeit (Tag/Nacht) mit Hilfe von Sensoren. Er bekam den Namen Klimabot. 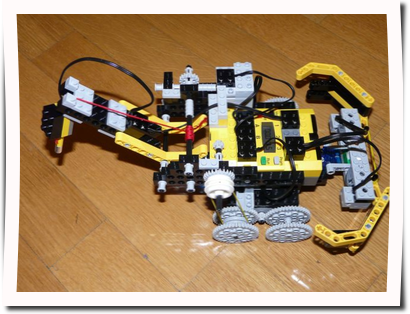
|













))
))



Kategorie:
Marsmission